 Case Report
Case ReportAbstract
Chronic knee dislocation is rare and debilitating for patient. Treatment for chronic knee dislocation is still debatable. There are two opposing goals of treatment which are obtaining stability and obtaining range of motion. We presented 2 patients with good clinical outcome using a gradual hexapodalic correction with Ortho-SUV system.
Introduction
Chronic knee dislocation is a rare condition. The best treatment for this problem is still debatable. We wish to report on 2 cases of chronic knee dislocation that we have successfully treated with gradual hexapodalic correction using the Ortho-SUV system.
Materials and Methods
2 male patients, aged 21 and 17 respectively, suffered from chronic knee dislocation. Both of them initially sustained left knee dislocation when they were involved in motor vehicle accident. Their knees remain unreduced despite reduction attempts and progressed to chronic knee dislocation. With consideration of the nature of their injuries as well as duration since trauma, both patients were counseled regarding aims of treatment and options available. We reckon that the ultimate aim of treatment for the first patient was to provide a stable knee in acceptable position for daily use while the second patient was aimed for supple knee to prepare him for ligamentous reconstruction later. Gradual reduction of the knee joint was carried out for both patients using the Ortho-SUV system (13 months post trauma for the first patient, and 4 months post trauma for the second patient), and full correction was achieved after 5 weeks and 8 weeks respectively. A period of programmed passive range of motion exercises was then commenced. Next, modification into hinge construct was done to allow the start of active range of motion exercises in a controlled manner.
Results
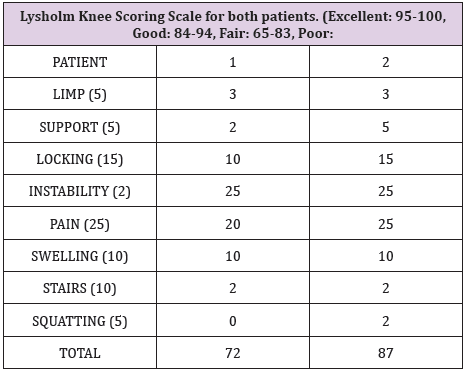
Table 1: Lysholm Knee Scoring Scale for both patients. (Excellent: 95-100, Good: 84-94, Fair: 65 83, Poor: <64).
Both patients were satisfied with their outcome. Good reductions of their knee joints were obtained as per radiographic evidence. Resulting knee functions were graded “fair” for the first patient and “good” for the second patient based on Lysholm Knee Scoring Scale. Apart from mild pin tract infections no other complications occurred during their course of treatment (Figures 1 & 2, Table 1).
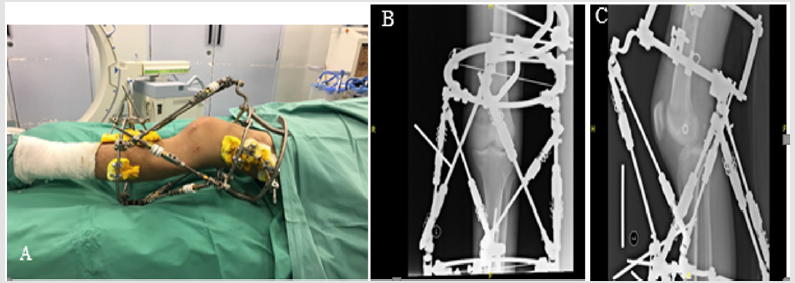
Figure 1: Postoperative knee photograph and plain radiographs of one of the patients. A. Ortho-SUV frame applied in-situ across the dislocated knee. B. AP view and C. lateral view plain radiographs demonstrating the posterior knee dislocation.
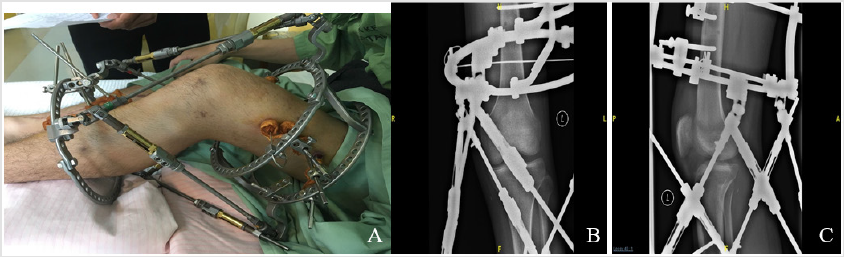
Figure 2: Post reduction knee photograph and plain radiographs of the same patient. (A) The photograph demonstrates gross anterior tibial translation compared to Figure 1 A. Ortho-SUV frame is currently in passive range of motion training mode. B. AP view and C. lateral view plain radiographs showing reduced knee joint.
Discussions
Knee dislocation is a debilitating injury. Despite advances in modern surgical technique, return to fully functioning knee is uncommon [1,4]. With even worse outcomes anticipated following a chronic injury, choosing the mode of treatment can be tricky. Only limited amount of publications are available regarding the strategies of treatment; most of which are case reports. There is also the dilemma about the aim of treatment, where there are contradictory interest between obtaining knee stability and suppleness for satisfactory range of motion. Both closed and open reduction of the chronic dislocated knee has been described, each with its own advantages and disadvantages [2,3,5-7,9]. Either way whenever immediate reduction fails or is not feasible, gradual reduction can be achieved using the hexapod System [8,9]. Gradual reduction is generally well tolerated by patients, and with hexapod system we can adjust the speed or duration of the correction program with the help of its software. Another advantage of hexapod system is it provides 2 modes of correction in knee dislocation; after gradual reduction is done it can be followed by gradual passive range of motion training mode. We are pleased that both of our patients managed to attain their knee reduction safely without significant complications. Ultimate aims of treatment need to be outlined clearly, as in the cases of our patients.
Conclusion
While it is difficult to choose the best treatment for chronic knee dislocation, we must understand that treatment needs to be tailored to each individual patient. Gradual hexapodalic correction using Ortho- SUV external device has good outcome in achieving knee relocation and was well tolerated by our patients.
References
- Robertson A, Nutton RW, Keating JF (2006) Dislocation of the knee. Bone & Joint Journal 88(6): 706-711.
- Saini R, Mootha AK, Goni VG, Dhillon MS (2010) Neglected irreducible posterolateral knee dislocation. Indian journal of orthopaedics 44(4): 468-470.
- Richter M, Lobenhoffer P (1998) Chronic posterior knee dislocation: treatment with arthrolysis, posterior cruciate ligament reconstruction and hinged external fixation device. Injury 29(7): 546-549.
- Howells NR, Brunton LR, Robinson J, Porteus AJ, Eldridge JD, et al. (2011) Acute knee dislocation: An evidence based approach to the management of the multi-ligament injured knee. Injury 42(11): 1198-1204.
- Khamaisy S, Haleem AM, Williams RJ, Rozbruch SR (2014) Neglected rotatory knee dislocation: A case report. The Knee 21(5): 975-978.
- Watanabe K, Yamada Y, Kura H, Itou M, Tsuchida Y, et al. (2001) Chronic knee fracture dislocation treated by the Ilizarov technique: Case report. Journal of Trauma and Acute Care Surgery 50(1): 151-154.
- Max Lingamfelter BS (2014) Chronic Knee Dislocation and Flexion Contracture Treated with Open Reduction and External Fixation-A Case Report. J Arthritis 3(3): 133.
- Liporace FA, Hommen JP, Su ET, Jeong GK, Dayan AJ (2006) Semiconstrained knee arthroplasty in the setting of a chronic knee dislocation: A case report. Journal of orthopaedic trauma 20(4): 286-288.
- Ferreira N, Marais LC (2012) Chronic knee dislocation treated with a Taylor Spatial Frame. SA Orthopaedic Journal 11(2): 61-64.
