 Mini Review
Mini ReviewAbstract
We present the design and evaluation of an unpowered energy-stored hip exoskeleton that provides assistive torque to the wearer with hemiplegia at the injured hip during walking. By making use of the theory of passive dynamic walking, an energy-stored mechanism which can realize the motion and power transmission from uninjured side to injured side was designed. According to the mechanism, the key parameters such as length and rotation angle was optimized, and the parameters of cam-spring is also calculated. Furthermore, the performance of exoskeleton was evaluated in an experiment in which two patients with hemiplegia participated. The Six Minute Walk Test and the Ten Meter Walk Test were conducted, and the two cases improved their walking speeds to higher levels wearing the unpowered hip exoskeleton. The results suggest that the unpowered hip exoskeleton can improve mobility for patient with hemiplegia.
Mini Review
Stroke, trauma or blow to the head can always lead to hemiplegia which injured lower extremity is characterized primarily by musculoskeletal weakness and functional deficits. Lower limb muscles are often affected, impairing the limbs ability to provide body support, forward propulsion, swing initiation, balance control, and foot clearance during swing. Among hemiplegia patients, gait impairment constitutes one of the most disabling impairments and may involve the complete loss of voluntary control of the leg muscles. Recent studies have attempted to identify the most important functions in the hemiplegia patients, with a view to enhancing quality of life. Although different methods were used in these studies, most of all identified mobility as one of the main objectives for the injured individuals, and thus rehabilitation training is needed to help these patients recover and regain mobility. Therefore, it is necessary and impactful to develop walking assistances that utilize state-of-the-art technologies to help hemiplegia patients regain the ability to walk as normal as possible [1]. In recent years, powered exoskeletons are proving to be a valuable tool in gait rehabilitation and walking assistance like ReWalk exoskeleton of ReWalk Robotics, REX exoskeleton of REX Bionics, Ekso exoskeleton of Ekso Bionics, HAL of the University of Tsukuba and so on. These systems have some limitations such as heavy weight, poor human-exoskeleton interface, high cost and so on. And it but may not be suitable for later stage patients who have regained limited mobility due to the kinematic restrictions and additional mass imposed by these exoskeletons [2]. Alternatively, unpowered exoskeletons (Figure 1) have been developed that aim for energy efficient walking. By using only unpowered elements, the power requirement reduces to zero [3].
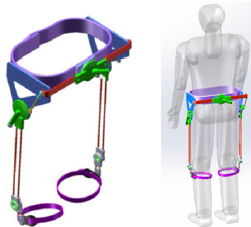
Figure 1: The model of unpowered hip exoskeleton.
In this paper, we present an unpowered hip exoskeleton (Figure 1) which includes two wearable structure in parallel with two thighs and an energy-stored unit which consists of cam and spring elements. By using the energy-stored mechanism and the wearable structure, the uninjured lower limb can transmit the motion and power to the injured side.
Design of Unpowered Hip Exoskeleton
Walking Principle
The hip exoskeleton design is based on an understanding of the biomechanics of human walking. Humans expend much of the energy used during walking at gait transitions when the leg goes from the swing to stance phase and vice versa. The leading leg absorbs energy when it contacts the ground, to cushion the collision and to store elastic energy in soft-tissues for subsequent rebound at pushoff. The trailing leg provides a small power burst as the lead foot hits the ground to transfer energy into the inverted body pendulum and to replace energy losses in the leading leg. As shown in (Figure 1), the hip exoskeleton includes two sets of RSSR spatial four-bar mechanisms, which are connected by an intermediate energystorage unit and are symmetrically distributed on both sides. When the extended leg (uninjured side) begins falling downward and forward, the RSSR mechanism in parallel with the uninjured thigh will be drive and energy-stored unit be rotated around the center axis. Thus, the springs of energy-stored unit will be compressed and energy is be absorbed. Consequently, energy-stored unit will rotate in the opposite direction when the spring releases, and the other RSSR mechanism will be driven, which pull the hip of injured side into flexion.
Optimization of RSSR Mechanism
The RSSR spatial four-bar mechanism is further abstracted and simplified to obtain the mechanism sketch, as is shown in (Figure 2). The lengths of the three movable bars L1 L2, and L3 of the RSSR spatial four-bar mechanism are l1, l2, l3 respectively. The length of the frame in the y1 direction is a, the length of the frame in the x1 direction i b s, and the length of the frame in the z1 direction is c. The bar L1 rotates only in the x2o2z2 plane, and has a degree of freedom. The angle between the L1 and the x2-axis is θ. The bar L3 rotates only in the y1o1z1 plane. The angle between the L3 and the y1-axis is δ, the angle between the bar L2 and the y1o1z1 plane is β, and the angle between the bar L2 and the x1o1z1 plane is α. According to the basic parameters of human body, the design parameters a, b, c would be set as design constraints. According to the requirement of unpowered hip exoskeleton, the rotation of L3 needs to reach a certain angle to ensure that the walking assistance can assist the wearer during the walking process. Therefore, the angular displacement and torque of L1 need to be effectively transmitted to L3. The optimization goal is that when L1 rotates, the angular displacement and torque of L3 should be close to those of L1 to ensure that the RSSR mechanism can achieve the auxiliary effect on patients with hemiplegia. The formula can be obtained [4].
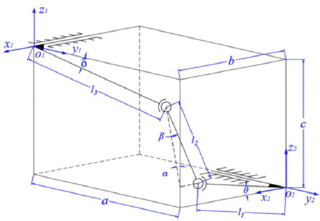
Figure 2: A schematic diagram of RSSR mechanism.

Hence, ∂δ/∂θ can be derived and calculated, and the result:

It can be seen in the formula (2) that the parameters of l1 and l3 is mainly considered in the optimization process to achieve the ultimate optimization goal. Changing the value of l1 and l3, and setting the value of a, b and c, then bringing it into equation (1), then the relationship between the variable of δ and θ is obtained. According to the optimal goal that when Δθ=±20°, Δδ can be closer to ±20°, the optimized parameters of l1 and l3 is obtained. Here, under the combination of the values of l1=200mm and l3=200mm, the range of δ reaches 40°, and the variation is positive and negative symmetry. The dynamics simulation also show that the torque transmitted by the four-bar mechanism of the RSSR space is basically unchanged under the combination of the values of l1=200mm and l3=200mm.
Calculation of Energy-Stored Unit
As shown in (Figure 3), cam-spring structure is applied in the energy stored unit of unpowered hip exoskeleton, which the cycle of cam rotates in accordance with the phase of the human gait, and the compression and release of springs is also in accordance with the phase of the human gait. It could be obtained from literature or experiment that the range of angle of hip flexion/extension is 30°. According to the relationship between angle of hip flexion/ extension and cam rotation angle, the cam rotation angle can be got: 30 cam hip θ =θ = ° . The plot of biological internal moments at the hip is also provided in some papers, like this [5-7]. Let the weight of a wearer is 70kg, the maximum of cam moment is Mcam = 0.18×70 =12.6Nm. At this point, the spring is compressed to its maximum. The force analysis diagram of cam roller is shown in (Figure 4).
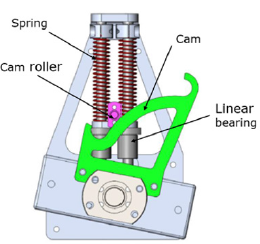
Figure 3: The model of energy-stored unit.
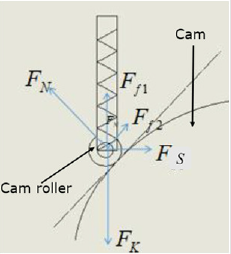
Figure 4: The force analysis of cam roller.
Hence, the equation (4) is derived.
Where, k is spring stiffness, and Δx is the compression maximum of the spring. l is the distance between the cam roller and the centre of the cam base. μ is friction coefficient of the linear bearing. And φ is the angle between the vertical motion direction of cam roller and the tangent direction of cam. The outline and the base circle radius of cam is determined by the values of l, Δx, φ, θcam, and spring can be select by the value of k l, Δx.
Combining the parameters of RSSR mechanism, above parameters can be calculated or optimized by experiments as the following. Δx=40mm, l=35mm, k=1.15N/mm.
Performance Evaluation
The performance of the hip exoskeleton was evaluated by testing on two patients (Figure 5) who had cerebrovascular accident. Goal of the test was to evaluate the effect. This was done by comparing different walking conditions with and without the hip exoskeleton. The comparison was made based on the Six Minute Walk Test and Ten Meter Walk Test.

Figure 5: The two patients participating in test.
Cases 1
The one, a 66-year-old woman, is a stroke survivor who lived independently at home and walked independently with a cane. In the lower left limb, she had poor minus strength in her hip. She walked with a stiff knee gait and external rotation of the hip which limited his walking speed and efficiency. With the unpowered hip exoskeleton, the subject was able to make substantial gains in both walking speed and endurance (Figure 6). Her walking speed improved from 0.45m/s to 073m/s, and her endurance also improved dramatically (122m in the six-minute walk to 178m).
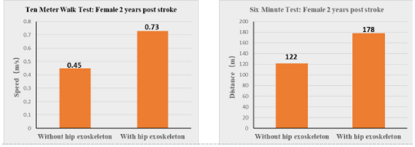
Figure 6: Ten meter walk test and Six minute walk test data for Case 1.
Cases 2
The other one is a 28-year-old young man who had cerebrovascular after a car accident. He has been rehabilitated in hospital for two months, and can walk independently for short distances, but cannot walk reciprocally up and down the stairs. This patient presented with left hemiparesis of the arm and leg. With fair strength in his hip flexors. He walked with circumduction at the hip which limited his walking speed and efficiency. This patient also demonstrated significant improvements in all metrics (Figure 7). His walking speed improved from 0.49m/s to 0.80m/s, and her endurance also improved dramatically (135m in the six-minute walk to 202m).
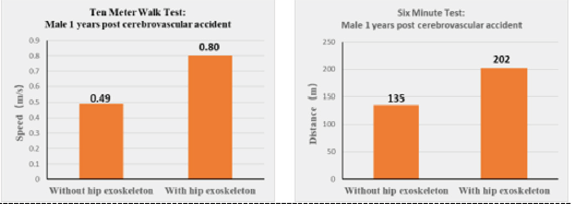
Figure 7: Ten meter walk test and Six minute walk test data for Case 2.
Conclusion and Discussion
The results of tests suggest that the unpowered energy-stored hip exoskeleton can improve mobility for patient with hemiplegia. This could be directly explained that the wearer’s injured hip flexion is returned to facilitate by auxiliary torque transmitted by the uninjured lower limb through RSSR mechanism and energystored unit. Additionally, the hip exoskeleton can provide support and stability, which will help patients to increase their ability of self-balance and enhance their sensation of touching the ground. The other benefit is their gait is improved, that is to say the swing of both lower limbs is more coordinated because of implied constraints. At the same time, it also brings some adverse effects such as the worse gait pattern for ankle.
Acknowledgement
This work was supported by National Key R&D Program of China (No. 2017YFB1304100) and the Basic Scientific Research Projects of National Research Center for Rehabilitation Technical Aids. The authors would like to thank Juewei He, Guangshun Liang, Fanyu Meng and Yang Jiang for their help with analysis and optimization of mechanism about our research work.
References
- Antonio J del Ama, Aikaterini D Koutsou, Juan C Moreno, Ana de los Reyes, Ángel Gil Agudo, et al. (2012) Review of hybrid exoskeletons to restore gait following spinal cord injury. JRRD 49(4): 497-514.
- Bing Chen, Hao Ma, Lai Yin Qin, Fei Gao, Kai Ming Chan, et al. (2016) Recent developments and challenges of lower extremity exoskeletons. Journal of Orthopaedic Translation 5: 26-37.
- Wietse van Dijk, Herman van der Kooij, Herman van der Kooij, Edsko Hekman (2011) Proc. Int. Conf. on Rehabilitation Robotics (Zurich) ETH Zurich Science City, Switzerland, p. 8.
- Juewei He, Guangshun Liang, Zhi Lan, Zhixiu Hao (2019) Proc. Int. Conf. on Mechanisms, Transmissions and Applications (Dalian), Springer Nature, Singapore, p 3-11.
- Wenbin Chen, Shuang Wu, Tiancheng Zhou, Caihua Xiong (2018) On the biological mechanics and energetics of the hip joint muscle–tendon system assisted by passive hip exoskeleton. Bioinspir Biomim 14(1).
- Kamran Shamaei, Massimo Cenciarini, Albert A Adams, Karen N Gregorczyk, Jeffrey M Schiffman, et al. (2014) Design and Evaluation of a Quasi-PassiveKnee Exoskeleton for Investigation ofMotor Adaptation in Lower Extremity Joints. Biomedical Engineering 61(6): 1809-1821.
- Elizabeth Russell Esposito, Kelly A Schmidtbauer, Jason M Wilken (2018) Experimental comparisons of passive and powered ankle-foot orthoses in individuals with limb reconstruction. Neuro Engineering and Rehabilitation 15(111).
